Kamera cofania
Kamera cofania
Czynność

W zależności od wyposażenia, podczas zmiany biegu na wsteczny, kamera 1 przekazuje widok obszaru za pojazdem na tablicę wskaźników lub na ekran multimedialny
wraz z ruchomą lub stałą linią pomocniczą (zależnie od pojazdu).
Uwaga: można dostosować niektóre ustawienia w menu ustawień osobistych pojazdu (patrz "Menu
ustawień osobistych ustawień pojazdu" w rozdziale 1).
Cecha szczególna
Upewnić się, że kamera nie jest zanieczyszczona (brud, błoto, śnieg, skropliny itd.).
OSTRZEŻENIE
Funkcja ma charakter pomocniczy. W żadnym wypadku nie zwalnia go z obowiązku uważnego
i odpowiedzialnego sposobu prowadzenia pojazdu.
Kierowca powinien zawsze być przygotowany na nagłe zdarzenia, jakie mogą wystąpić
podczas jazdy: w czasie wykonywania manewrów należy zwrócić uwagę na wąskie przeszkody
ruchome (np. dziecko, zwierzę, wózek, rower, kamień, słupek itp.).
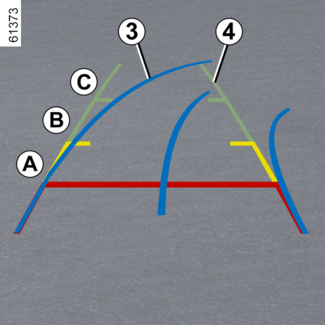
Ruchome pole pomiaru odległości 3
(zależnie od wersji pojazdu)
Informacja wyświetla się w kolorze pomarańczowym na ekranie multimedialnym 5. Wskazuje tor jazdy samochodu w zależności od położenia kierownicy.
Stałe linie pomocnicze 4
Stała linia pomocnicza zawiera kolorowe znaczniki A, B i C, które wskazują odległość za pojazdem:
- A (czerwony) w odległości około 30 cm od pojazdu;
- B (biały) około 60 centymetrów od pojazdu;
- C (niebieski) około 120 centymetrów od pojazdu.

To pole pomiaru odległości pozostaje stałe i pokazuje tor jazdy samochodu, jeśli jego
koła są ustawione na wprost.
Korzystając z tego systemu należy najpierw obserwować pola pomiaru (ruchome dla toru
jazdy i stałe dla odległości). Po wyświetleniu obszaru oznaczonego na czerwono, w
celu precyzyjnego zaparkowania należy śledzić obraz z kamery przedstawiający zderzak.
Porada
Ekran pokazuje odwrócony obraz.
Pola pomiaru odległości to odwzorowanie rzutu na płaską powierzchnię podłoża; informacje
z tych pól należy pominąć, gdy nakładają się one na przeszkodę pionową lub ustawioną
na ziemi.
Obiekty ukazujące się na skraju pola ekranu mogą być zdeformowane.
W przypadku zbyt silnego natężenia światła (śnieg, pojazd stojący w słońcu…) mogą
wystąpić zakłócenia widoczności obrazu z kamery.
Jeśli bagażnik jest otwarty lub źle zamknięty, pojawia się komunikat „otwarty bagażnik” i – w zależności od wersji pojazdu – znika obraz z kamery.
Różnica między szacowaną odległością a rzeczywistą odległością
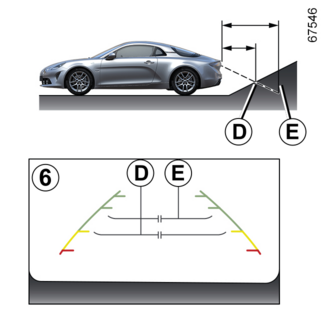
Jazda do tyłu w górę po stromym zboczu
Stałe linie pomocnicze 6 wskazują mniejsze odległości niż ma to miejsce w rzeczywistości.
Obiekty pokazane na ekranie znajdują się dalej na zboczu.
Na przykład, jeśli na ekranie wyświetlany jest obiekt w strefie D, rzeczywista odległość do obiektu odpowiada strefie E.
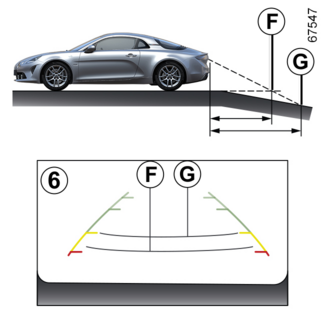
Jazda do tyłu w dół po stromym zboczu
Stałe linie pomocnicze 6 wskazują dalsze odległości niż ma to miejsce w rzeczywistości.
Dlatego obiekty wyświetlane na ekranie są w rzeczywistości bliżej nachylenia.
Na przykład, jeśli na ekranie wyświetlany jest obiekt w strefie G, rzeczywista odległość do obiektu odpowiada strefie F.
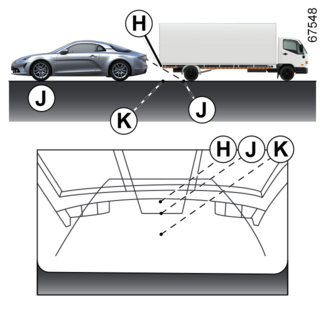
Jazda w tył w kierunku wystającego obiektu
Pozycja H wydaje się być dalej niż pozycja J na ekranie. Jednak pozycja H znajduje się w tej samej odległości co pozycja K.
Trajektoria wskazana przez stałe i ruchome linie pomocnicze nie uwzględnia wysokości
obiektu. Istnieje więc ryzyko, że pojazd zderzy się z przedmiotem podczas cofania
w kierunku pozycji K.